Original text
Contribute a better translation
The experiment aims to explore the main features of ARM Cortex M4 processor-based architectures for industrial applications . Hardware resources as well as DAVE 4.3.2-based software components centered around the ARM GCC 4.9 compiler are explored .
At the end of the experiment, detailed information will be available on how to make applications based on ARM Cortex M4 and DAVE 4.3.2 processors.
- Development platform XMC4500 Relax Kit, microUSB cable, - DAVE 4.3.2 

- Explore the XMC4500 relax kit platform user manual and identify the main components and signals from the extension connectors. 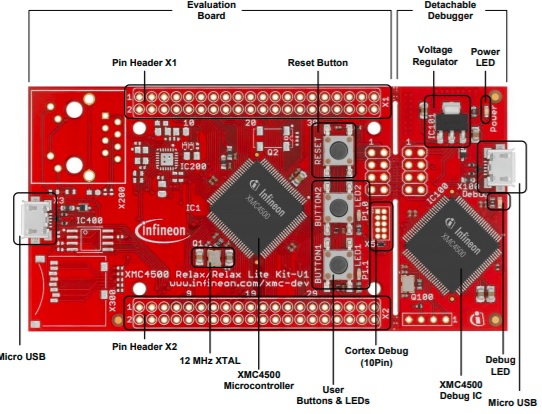
- Analyze how to power the XMC4500 relax kit platform;  - Analyze the interconnection of the LEDs and buttons on the XMC4500 relax kit shown below: 
- Examine the DAVE components:   - Carry out a DAVE project with the prototype program for the XMC4500 platform; 
1. Modify the prototype program to activate the LED connected to P1.0; 2. Add the Clock component, set the working frequency of the processor to 8 Mhz and examine the execution of the prototype program; 
3. Create a program that will sequentially activate the 2 existing LEDs on the platform; 4. Using DEBUG follow the step by step execution of the prototype program; 5. Create a program that allows you to determine the maximum switching speed of an I / O pin.
- Development of active systems for the Internet of Things ; - Making intelligent machines; - Realization of control systems for lighting with sustainable energy; - Development of control modules for robots ; - Realization of applications based on programmable digital control; - Making intelligent actuators; - Making nodes with sensors and actuators for cars; 

|


