"Gh.Asachi" Technical University of Iasi - Fac. Automation and Computers
Embedded Computers
|
Wednesday, Feb. 10, 11:28 p.m.
|

|
Experiment No.6

|
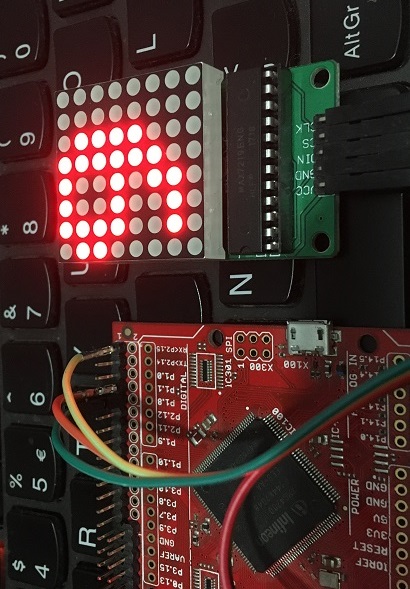
ARM Cortex M4 - matrix display control 8x8 MAX 7219
|
L6.2 General presentation, purpose
|
The laboratory work aims to create a display system based on 8x8 matrix cells provided with MAX 7219 type controller . The possibilities of using DAVE components for the SPI interface are explored as well as the ways of making graphical and alphanumeric representations. At the end of the laboratory, useful information will be available on how to make display systems with matrix blocks interconnected to Infineon XMC 4500 systems.
Hardware: XMC4500 platform relax kit, 8x8 displays, breadboard,
Software: DAVE4.3.2 development environment;

Program Matrix Heart ---------- Video sequence
Number generator program ---------- Video sequence
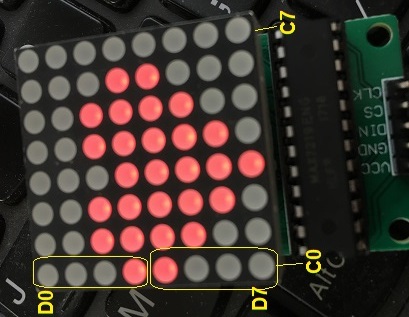
- MAX 7219 interconnected with the matrix of 64 LEDs is analyzed ;
-
It explores the resources of the XMC4500 relax kit development platform provided with Cortex M4 processor;
-
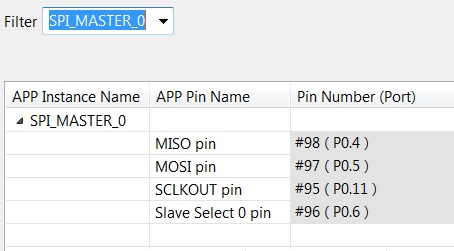
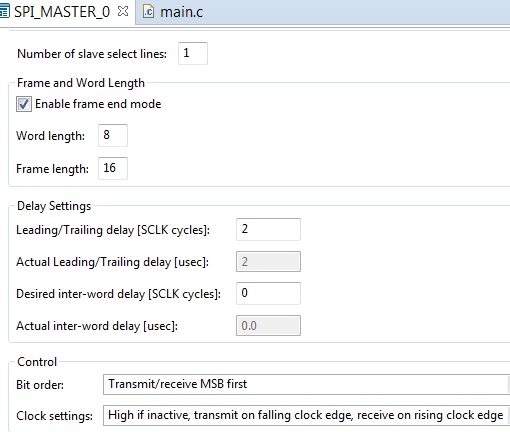
DAVE resources for SPI communications are being explored
- The detachment mode of the DEBUG module is analyzed in the case of dedicated applications;

- The execution of the prototype program for the graphic and alphanumeric control of the matrix modules with LEDs is explored.
- The proposed problems are solved
1. Create a program that allows you to generate the alphabet .;
2. Extend Problem 1 to 2-4 cascaded display cells;
3. Create an alphanumeric display system on 6 modules; 4. Create a program that allows you to display the processor temperature;
5. Create an application that allows you to change the display intensity;
- L6.7 The laboratory may be extended to:
|
- Realization of display systems with increased visibility;
- Development of warning systems in automobiles;
- Realization of traffic control systems;
- Creation of large graphic blocks;
- L6.8 Collateral information
|
 © 2020 Fl. Pantilimonescu & A. Stan - Technical University Iasi, Romania © 2020 Fl. Pantilimonescu & A. Stan - Technical University Iasi, Romania
|
|