Technical University "Gh.Asachi" Iasi - Fac. Automation and Computers
Design with Microprocessor
|
Monday, January 28, Time 19:37
|
|
Experiment No. 11
|
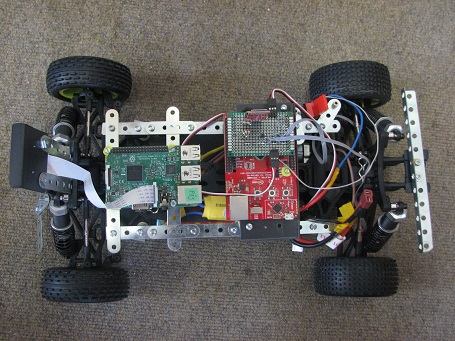
ARM Cortex M4 - school car
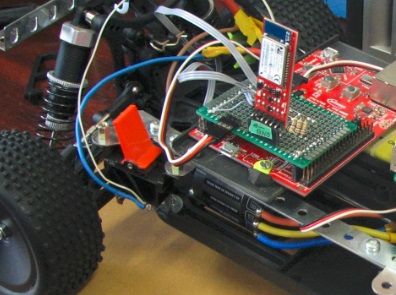
The experiment shows an alternative electric vehicle fitted with traction made with a BLDC engine and a servo steering. It is a school car designed for training for the eco-friendly competition organized by Continental. The active elements are controlled by the XMC4700 platform provided with the Cortex M4 processor. At the end of the lab, we will have basic knowledge about how to achieve the electric vehicles involved in the training process.
European phase of the Intelligent Car Racing competition
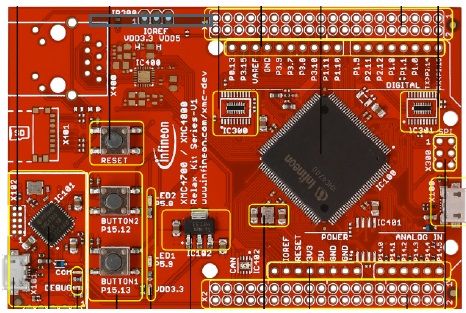
Hardware: Platform XMC4700 relax kit, vehicle chassis, servo, BLDC motor, 12 V battery,
Software: DAVE4.3.2 development environment;
Program prototip control directie/servo
Program prototip control tractiune/BLDC
|
L11.5 Mod de desfasurare laborator
|
-
Se exploreaza resursele platformei de dezvoltare XMC4700 relax kit prevazuta cu procesor
Cortex M4 ;
- Se examineza structurile mecanice destinate realizarii vehicolelor electrice pentru
competitii;
-
Se analizeaza modul de realizare a directiei cu servo:
- Se analizeaza modul de realizare a tractiunii (4X4) cu motor BLDC;
- Se urmareste executia programului prototip destinat controlului directiei cu servo;
- Se exploreaza executia programului prorotip destinat controlului tractiunii cu BLDC;
- Se rezolva problemele propuse
1. Dezvoltati o aplicatie pentru a determina viteza maxima de miscare a directiei;
2. Conectati un servo modificat si puneti in evidenta modurile de functionare a motorului;
3. Dezvoltati o aplicatie pentru afisarea turatiei rotilor de tractiune ;
4. Realizati un program care va permite afisarea nivelului acumulatorului pentru tractiune;
5. Realizati o aplicatie care va permite controlul cu un telefon mobil/BT a vehicolului;
- L11.7 Laboratorul poate fi extins pentru:
|
- Realizarea actuatoarelor cu servo;
- Realizarea vehicolelor electrice;
- Realizarea sistemelor mobile activabile cu telefoanele mobile;
- Realizarea sistemelor mobile pentru electromobility - Continental;
- Realizare vehicolelor inteligente pentru NXP Intelligent Car Racing 2018;
- L11.8 Informatii colaterale
|
 © 2017 Fl. Pantilimonescu - Technical University Iasi,Romania © 2017 Fl. Pantilimonescu - Technical University Iasi,Romania
|
|