Technical University "Gh.Asachi" Iasi - Fac. Automatic and Computer
Design with Microprocessors
|
Tuesday, January 29, 20: 3
|
|
Experiment No. 12

|
ARM Cortex M4 - BLDC control for UAV and e_vehicle
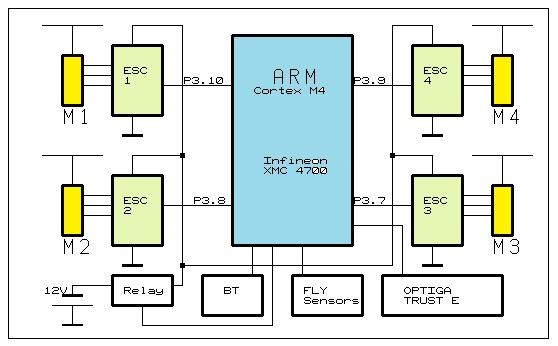
The laboratory experiment introduces basic notes on how to design and implement BLDC drive systems for drones and electric traction machines. The experimental solution uses an ARM Cortex M4, ESC (electronic speed controller), a set of BLDC motors with an external rotor, and a BLDC motor for vehicle traction. It is intended to use DAVE components to generate PWM signals for engine control in order to achieve maximum load force. At the end of the alborator there will be useful information on how to make multicopter
and e_vehicle structures ;
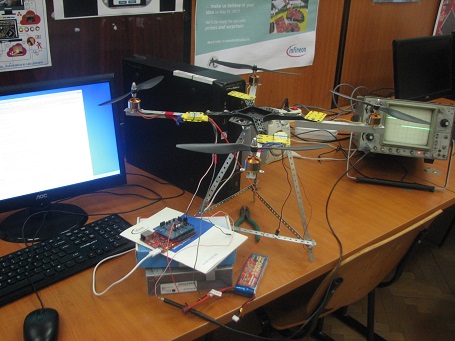
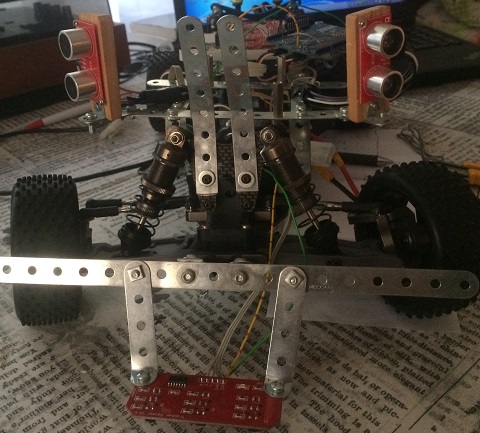
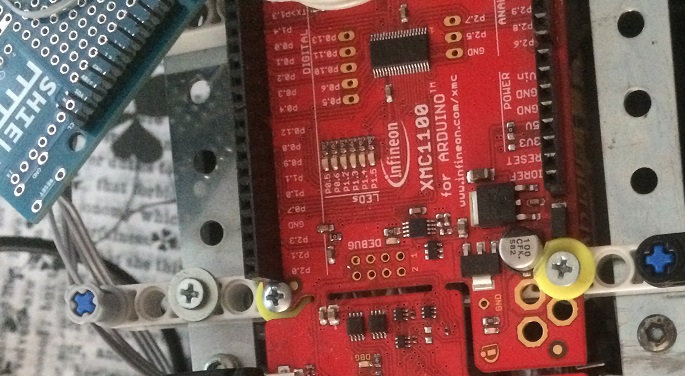
Hardware: Platform XMC4700 Relax Kit, Platform XMC1100 Boot Kit; set 4 ESC, 4 BLDC motors mounted on the drones chassis, 12 V battery, electric_car prototype with servo and BLDC.
Software: Development Environment DAVE4.3.2;
BLDC propeller control
program Drive direction and traction control e_car
- It explores <a href = "http://www.infineon.com/cms/en/applications/consumer/multicopters/"> the basics needed to make a multicopter;
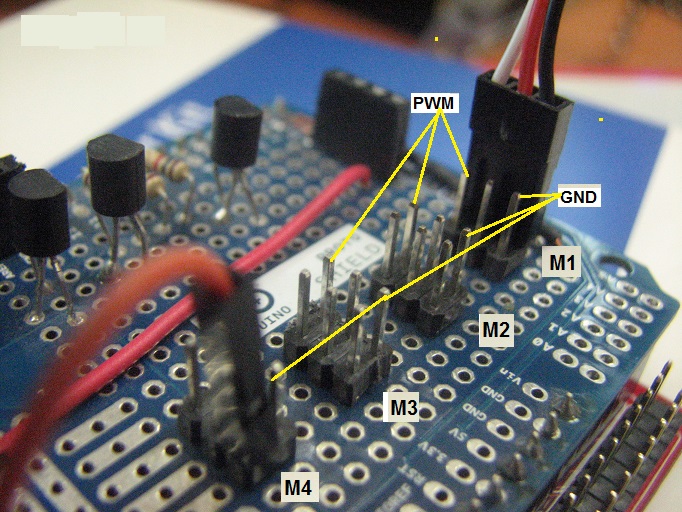
- It explores the resources of the XMC4700 development kit development kit and interfacing with the ESC modules for BLDC control;
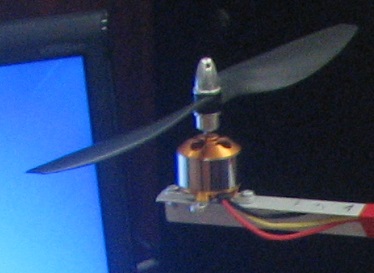
- Examining the mechanical structure for the location of the four BLDC engines;
-
It analyzes the propulsion propulsion grip on the spindle;

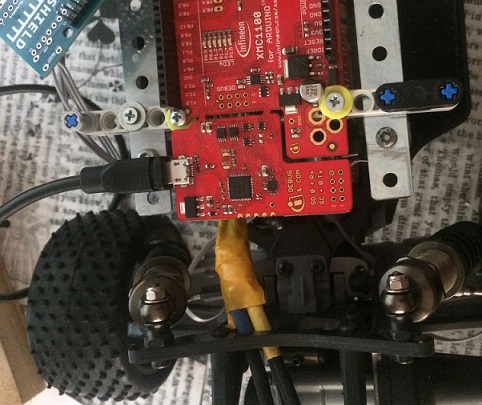
- It explores the e_car architecture provided with steering servo and BLDC for traction;
- It is intended to execute the prototype program for the ESC initialization sequence;
- It is intended to perform the prototype program for engine speed control;
- It solves the proposed problems.
1. Modify the prototype program to determine the minimum starting speed of the BLDC engine;
2. Make a program that will allow you to get the maximum speed of the BLDC engine;
3. Develop a solution for determining the rotation speed of the propeller;
4. Develop a solution for determining the bearing strength of a propeller engine;
5. Make a program that will allow e_car to travel by a black band on a white path;
- L12.7 The laboratory may be extended to:
|
- Implementation of UAV equipment;
- Execution of actuators with BLDC;
- Manufacture of portable electric tools;
- Realization of entertainment / games vehicles;
- Creating air transport systems;
- Implementation of UAV systems for military applications ;
- L12.8 Collateral Information
|
 © 2019 Fl. Pantilimonescu - Technical University Iasi, Romania © 2019 Fl. Pantilimonescu - Technical University Iasi, Romania
|
|