Technical University of Iasi - Fac. Automation and Computers
Design with microprocessors
|
Thursday, 31 Jan, 119
Time 21: 8

|
 |
Experiment No. 10

|
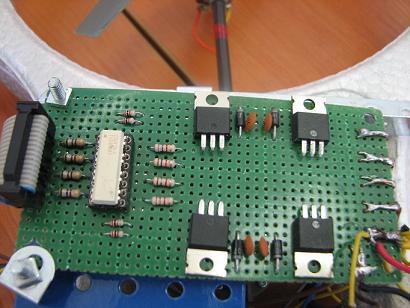
FRDM ARM Cortex M0 - helicopter engine control with acceleration and tuch sensors
The lab work explores how to use the Accelerator and Touch sensors to control four chopin current motors that propel a helicopter. Engineer interface / programming details are tracked, as well as the possibilities for using Touch / Touch sensors to control drone systems.
FRDM platform, helicopter extension, browser and connection at www.mbed.org, oscilloscope, multimeter.

Control motoare su sensor tuch
Control motoare cu sensor de acceleratie
|
L10.5 Mod de desfasurare/urmarire experiment:
|
- Analizati schema interfetei pentru controlul celor 4 motoare la platforma FRDM si verificati corectitudinea conexiunilor;

- Analizati specificatiile clasei TSIsensor
- Analizati specifictatiile clasei MM
- Rulati programul prototip;
- Rezolvati problemele propuse.
1. Modify the prototype program so that you can selectively operate the four motors; ;
2. Make a program that will allow you to view the information provided by the Tuch sensor;
3. Create a program that will allow you to view the information provided by the acceleration sensor;
4. Create a program that will start the engines if the FRDM platform is inclined by more than 30 gardens; 5. Perform an independent task that will display the current consumption of the four motors during operation using the prototype programs;
|
L10.7 The experiment may be extended to:
|
Manufacture of actuators with brushless DC motors;
Developing mobile air-moving platforms;
Making human-machine interaction devices without moving parts;
Creating systems for determining the inclination of objects;

|
L10.8 Collateral information:
|
|
© 2019 Fl. Pantilimonescu - Fac. Automation and Computers Iasi
|
|