Technical University of Iasi - Fac. Automation and Computers
Design with microprocessors
|
Sunday, 3 Feb.,
Time 19:21

|
 |
Laboratory work no. 11
|
Mbed - Interface with Touch LCD
The lab experiment has a Touch LCD extension for mbed / FRDM platforms. The details of the interconnection and the basic functions for displaying data in alphanumeric and graphical form are presented. At the end of the lab there will be detailed information on the use of touchscreen display systems.
Mbed platforms, extension Tuch LCD TFT PROTO model,
Documentation:
UNIX tty
mbed / FRDM - serial communications
Mode alphanumeric
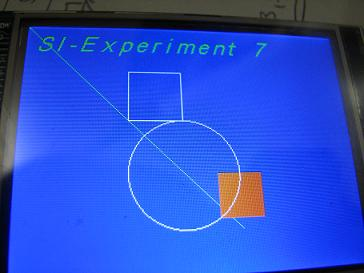
mode operation Graphical mode operation mode
|
E11.5 Experiment Running / Tracking Mode:
|
- Connects the LCD to mbed according to the connections specified in the prototype program;
- The mbed.org server locates the lib associated with the display system;
- Program sequences are performed to test the connections' correctness;
- Compilates and launches the prototype program;
- The oscilloscope monitors the format of the command signals sent to the display;
- The correctness of the transmission is analyzed;
- Solving prototype issues;
1. Make a program that will allow you to highlight the duration of the TFT.cls () operation; 2. Make a program that will allow you to create a classic measuring instrument with the needle indicator.
 3. Make a program that will display on LCD the characters received through the serial entry; ;
3. Make a program that will display on LCD the characters received through the serial entry; ;
4. Make an oscilloscope style program that will display the analog signal applied to one of the A / D converter inputs;
5. Make a program that will display the exact time taken from the RTC on the LCD.

|
E11.7 The experiment may be extended to:
|
- Development of active peripherals for servers with Rpi;
- Developing mbed-Rpi applications;
- Realizing mbed-Rpi-Touch LCD applications;

|
E11.8 Documentary references:
|
|
© 2019 Fl. Pantilimonescu - Fac. Automation and Computers Iasi
|
|