Technical University of Iasi - Fac. Automation and Computers
Design with Microprocessors
|
Friday, 1 Feb., 119
Time 12:25

|
 |
Experiment No. 4

|
ARM Cortex M0 + - unipolar step-by-step interface and control
ARM Cortex M3 - Unipolar Step-by-Step Interface and Control The experiment proposes to offer a one-step solution for controlling single-pole stepper motors using an M3 -mbed cortex ARM platform. At the end of the lab, basic information will be provided on the use of cloud resources for the development of ARM family of processor applications, as well as details on how to interface and program the step-by-step micromotors.
MBED platform, unipolar step-by-step micromotor extension, TANDON micromotor model, KP4M4.

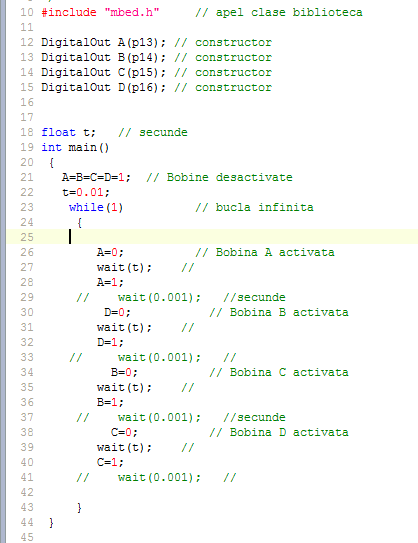
Prototype program
|
E4.5 Exploration / Tracking Experiment:
|
Connect the step-by-step motor extension to the mbed according to the scheme:

- Check the correct mpp-mbed connections according to the extension pins signals;
- - Check the correctness of data connections and power lines;
- - Observe the relatively large currents (400 mA);
- - Analyze the necessity and way of realizing the galvanic separation between the mbed and the motor;
- - In the source of the prototype program analyze how to generate the signals necessary for the magnetic field inversion of the micromotor;
- - View the shape of the signals at the extension pins with the oscilloscope.

- Modify the prototype program so that you move the motor shaft by one step at intervals of 1 sec.
- Perform a program sequence that will highlight the operation of the micromotor in interlace mode.
- By tracking engine features, make a program that will ensure continuous motion at full speed.
- Make a program that allows you to identify the number of steps for a complete rotation of the engine shaft.
- Make a program that will allow viewing with the oscilloscope of perturbations introduced by the motor on the power lines

|
E4.7 The experiment may be extended to:
|
Internet control of actuators with MPP;
Making Internet of Things with actuators; Achievement of positioning systems;

|
E4.8 Collateral Information:
|
|
© 2018 Technical University of Iasi - Fac. Automation and Computers
|
|
{kind=link}