Original text
Contribute a better translation
The laboratory paper presents an example of using an ARM Cortex M3-based system to acquire information from analog sensors. The details of using the analogue / numeric module for the acquisition of information provided by motion sensors as well as the use of the related software modules are tracked.
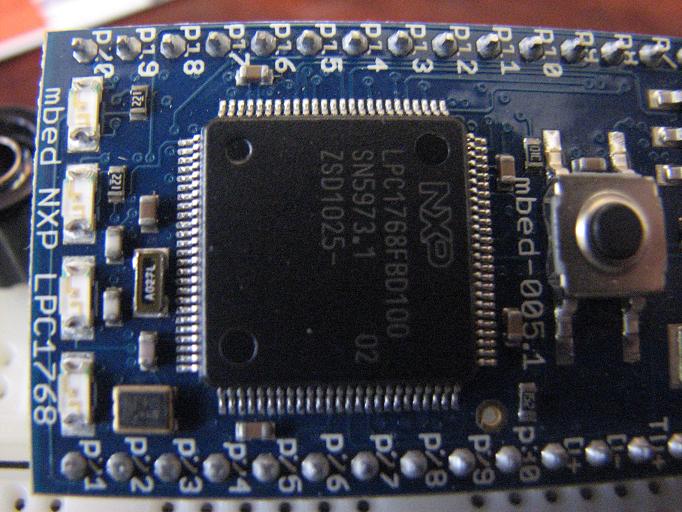
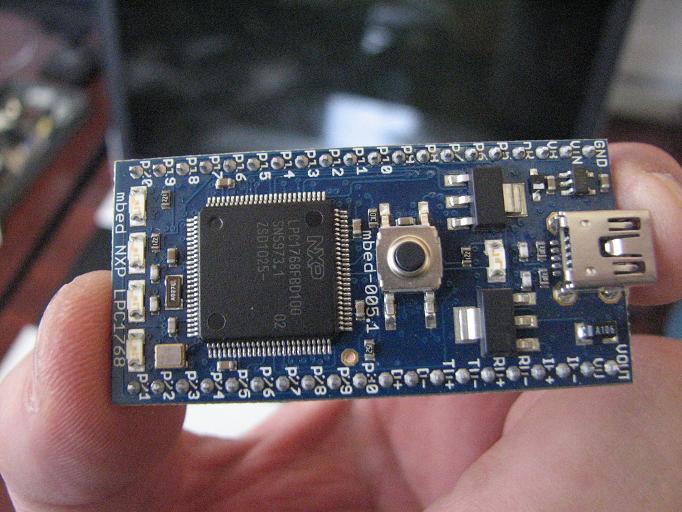
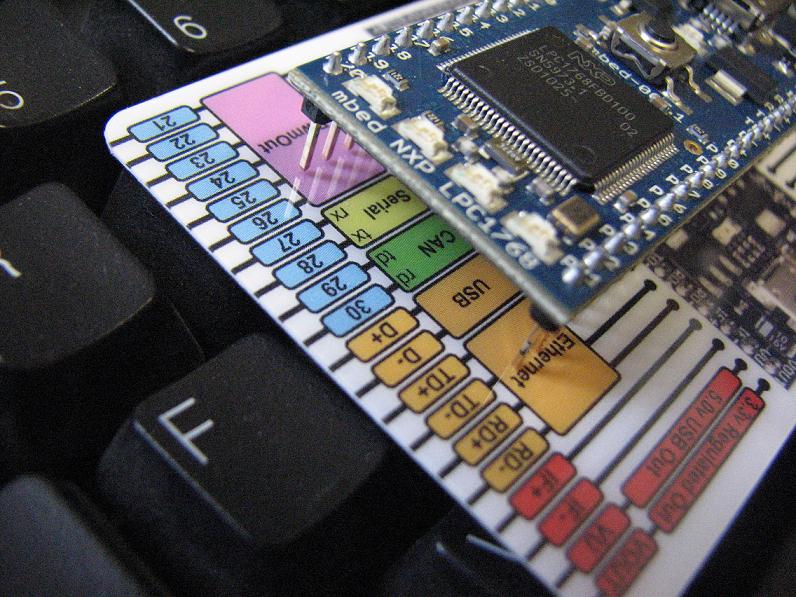
ARM Cortex M3 Platform - mbed,,

1. Modify the prototype program to view data as binary / ASCII information. 2. Modify the prototype program to view data as floating point / ASCII information 3. Make a program sequence that will activate the 4 LEDs according to the position of the potentiometer 4. Establish a program that will allow the stability of data provided by the converter A / D. 5. Perform a program that will turn the LED1 on only the center position of the potentiometer.
- Realization of mirror guidance systems; - Acceleration pedal automatic control; - Achievement of turret positioning systems; - Realization of steering systems;
|