Experimentul de laborator isi propune sa ofere introducere in universul Tiny Machine Learning utilizand o prima instalare Tensorflow pe platforma Raspberry Pi 5 AI Kit prevazuta cu resursele software aferente. Ca alternativa poate fi uilizat si < ahref="">Google Colab. Sunt utilizate componente de baza din interfata Keras pentru introducerea conceptelor de start pentru dezvoltarea aplicatiilor cu Tensorflow/Tensorflow Lite destinate sistemelor incorporate. 
 Hailo Hailo
Platforma Rpi 5 AI Kit sau Google Colab, SD cu Linux 64 biti si SSH activat, router wifi, conexiune la Internet, PC cu aplicatie SSH client (Putty) 
1.a Secventa Hello World pe TensorFlow 1.b Secventa program test instlare corecta Tf 1.c Secventa apel model din Keras 1.d Program vizualizare parametri model 1.e Program extragere reguli din date 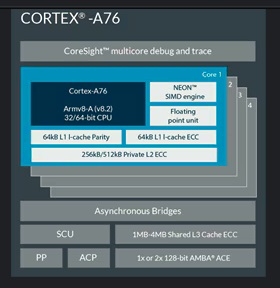
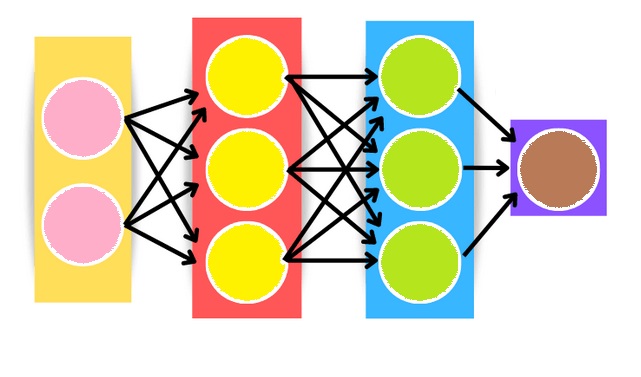
Pe platfrma Rpi 5 bazata pe procesor Arm Cortex-A76 se instaleaza sistem de operare pentru procesoar pe 64 de biti, uzual se foloseste versiunea Debian Bookworm. 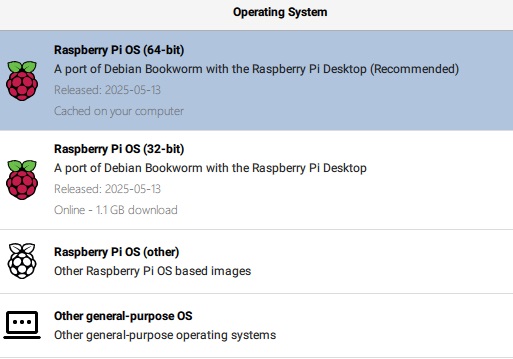
> python3 -m venv ~/venv/ > source ~/venv/tf/bin/activate > python -m pip install --upgrade pip setuptools wheel Reconectare la spatiu virual dupa reboot se poate astfel: > source .venv/bin/activate # sau > source venv/tf/bin/activate # sau source ~/venvs/tf/bin/activate Instalarea tensorflow se realizeaza astfel : > pip install tensorflow-aarch64==2.16.1 Dupa operatia de instalare se exploreaza programele exemplu care necesita incarcare rulare si documentare asupra operatiilor efectuate Dupa reluare Programele exmplu pot fi rulate si pe Google Colab conform imaginii de mai jos: 
1. Realizati o aplicatie in care va permite determinarea timpului de executie operatie de inmultire a 2 matrici ; 2. Determinati modul de variatie a temperaturii procesorului functie de conditiile de lucru (incarcare, radiatoare etc.) ; 3. Idenificati functiile implementate pe procesorul utilizat in power management de pr Rp5; 4. Realizati un program care va permite reprezemtarea grafica clasica a retelei neuronale realizata cu functia model din Keras; 5. Verificati functionarea programelor exemplu 2-5 pe platforma GoogleColab. 
- Dezvoltarea sistemelor educationale pentru edge AI - Utilizarea resurselor cloud pentru dezvoltarea aplicatiilor profesionale; - Pregatirea viitoarei generatii de dezvoltatori edge AI; - Dezvoltarea masinilor care pot acumula experienta 
"If you want to go fast, go alone. If you want to go far, go together." — African Proverb
|