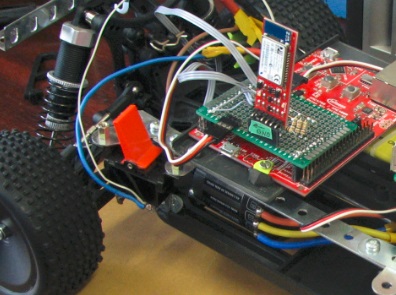
Experimentul prezinta o alternativa de vehicol electric prevazut cu tractiune realizata cu un motor BLDC
si directie realizata cu servo. Este o masina scoala destinata instruirii pentru competitia
emobility organizata de Continental.
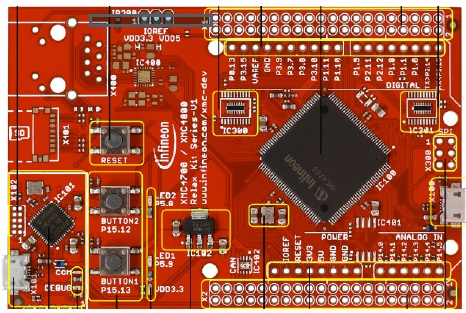
Elementele active sunt controlate prin intermediul platformei XMC4700 prevazuta cu procesor Cortex M4.
La sfarsitul laboratorului se vor detine notiuni de baza despre modul de realizare a vehicolelor
electrice implicate in procesul de instruire.
Hardware: Platforma XMC4700 relax kit, sasiu vehicol, servo, Motor BLDC, acumulator 12 V, Software: Mediul de dezvoltare DAVE4.3.2; 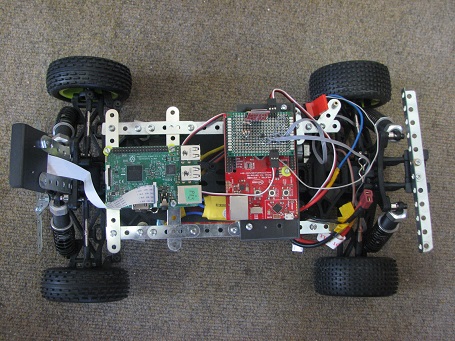
  Program prototip control tractiune/BLDC  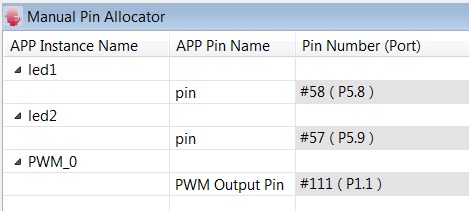
|

 © 2017 Fl. Pantilimonescu - Technical University Iasi,Romania
© 2017 Fl. Pantilimonescu - Technical University Iasi,Romania