Tesla e_motor Tesla e_car BLDC basics versus BitMOTOR - video
In the era of electric vehicles, generating the conditions for achieving motion
is essential. The laboratory experiment aims to provide a motion generation platform controllable through a processor from the ARM Cortex M0 range present
in the Raspberry Pi Pico platform.
The motion is realized by generating a programmable magnetic field capable of interacting with a permanent magnet placed on a bicycle wheel.
The interfaces for connecting the inductors and the involved sensors represent relatively universal solutions usable in the e_car universe.
At the end of the laboratory you will have relevant information about how to build programmable actuators based on magnetic fields usable for motion generation operations.
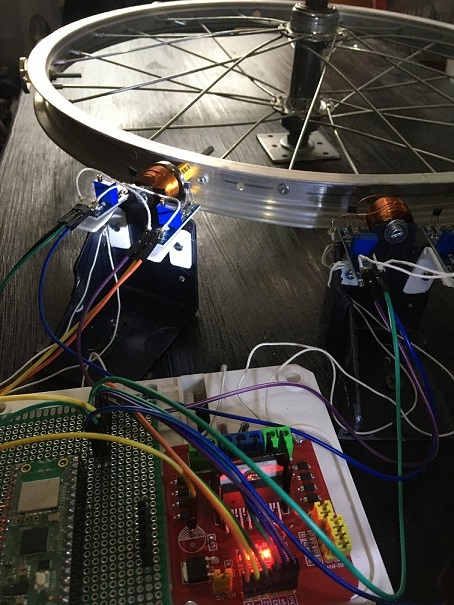
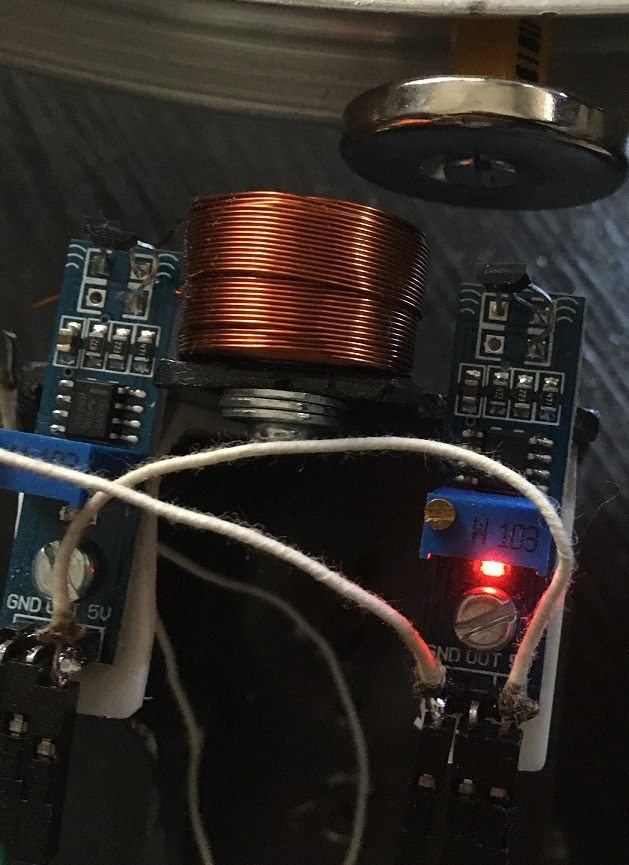
Hardware: Pico/W Development platform LM 298 driver module Inductors 14 inch bicycle wheel Neodymium magnets Hall sensors A3144 type. Software: Thonny MicroPython 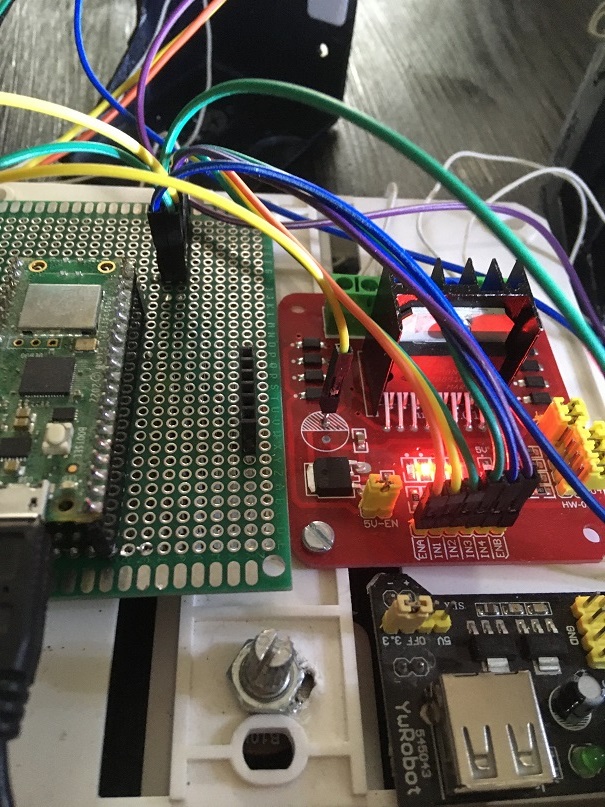 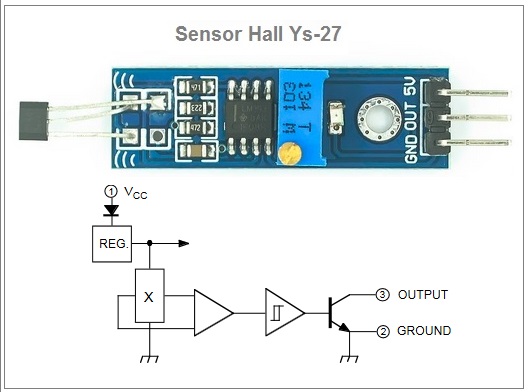
Video sequence 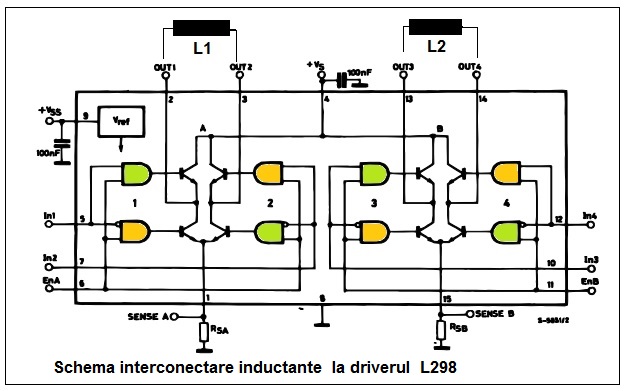
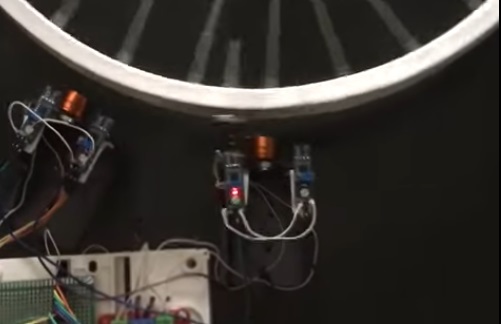
A bicycle wheel is mobile on a flat support. On the circumference of the wheel, at relatively equal distances, 6 permanent neodymium magnets are mounted. On the outside, 2 coils powered through the LM 298 type driver are placed on fixed supports. This driver is controlled through the GPIO ports of the RpI Pico microcontroller according to the schematic below. 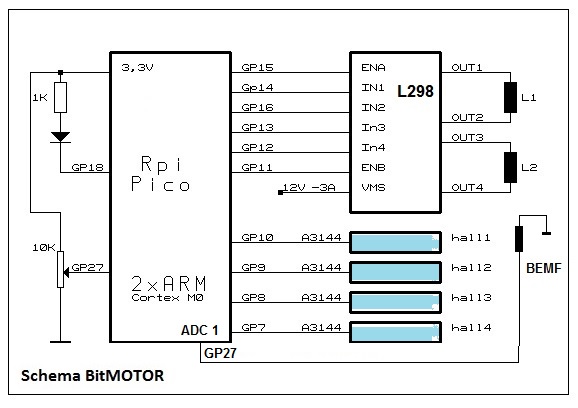
1. Create motion control sequences observable with the oscilloscope; 2. Determine the action area of the Hall sensor; 3. Determine the current consumption of a coil. 4. Determine the rotation speed of the mobile system; 5. Develop a solution for remote motion control; 6. Highlight the function of electricity generator.
|

 © 2024 , Fl. Pantilimonescu -Technical University of Iasi
© 2024 , Fl. Pantilimonescu -Technical University of Iasi