Experimentul de laborator isi propune sa evidentieze modul de conectare la Pico a perifericelor cu protocol I2C utilizandu-se in acest sens senzorul de acceleratie ADXL345. Se urmareste lectura datelor si comunicarea acestora prin BT pentru aplicatii de control ale gesturilor utilizabile in TinyML. Pentru realizarea actuatoarelor de timp real este utilizata platforma Raspberry Pi Pico capabila sa comunice utilizand module BT , totul fiind programat in MicroPython. La sfarsitul laboratorului se vor detine informatii utile despre modul de utilizare a sensorilor de miscare cu protcol I2C si uilizarea acestora in aplicatii. 
Micropython 
1. Vizualizare inclinare x, y, z 2. Nivela cu 2 LED-uri 3. Pico - BT- telefon mobil ---------Secventa video 4. Pico UART data format-------Secventa video 5. Control local 3 LED 6. Control 3 LED cu telefon mobil 
Platformele de dezvolare Rpi Pico dispun de o structura de procesare bazata pe 2 nuclee ARM Cortex M0+ care ii asigura cel mai bun nivel de eficienta energetica. Pentru a fi programabile in Python acestea necesita incarcarea unui modul interpreter specific. Practic, la cu butonul de pe Pico apasat, acesta se conecteaza la USB find astfel vizibil ca o extensie de memorie in care se poate transfera interpretorul micropython. In Windows poate fi utilizata aplicatia Thonny pentru editare si transfer cod pe Pico. Pentru realizarea experimentelor propuse este necesara interconectarea pe breadbord a componentelor reprezentate in figura urmatoare: 

             
1. Realizati un program care va permite transmiterea continua prin BT a datelor prin B daca este apasa comutatorul k; 2. Pe Rpi Pico realizati un program care va emite prin BT inlinatia pe axa X; 3. Pe Rpi Pico realizati un program care va emite prin BT inlinatia pe axa y; 4. Realizati un program care va modifica intensitatea unui LED functie de inclinatia pe axa x; 
5. Pe Rpi Pico realizati un program care, in urma receptiei unui caracter pe UART1 va returna valorile pentru x. y, z.;
- Realizarea actuatoarelor tinyML ; - Realizarea perifericelor pentru telefoanele mobile; - Realizarea retelelor locale de sensori/actuatoare; - Dezvoltarea aplicatiilor pentru Embedded Linux. - Realizarea proiectelor pentru Hackster.io 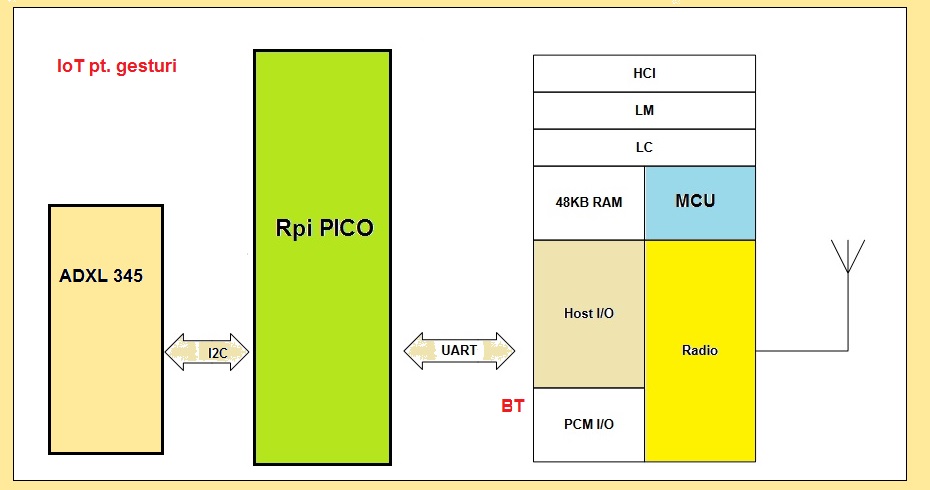
|


 © 2024 Fl. Pantilimonescu - Fac. Automatica si Calculatoare
© 2024 Fl. Pantilimonescu - Fac. Automatica si Calculatoare