The laboratory experiment aims to introduce the basic elements from the universe of
Linux Dronecode destinat sa ofere o structura hardware/software deschisa pentru dezvoltarea UAV . Sunt explorate componentele de baza, respectiv QGROUNDCONTROL MAVLink .
Platforma Raspberry pi 2/3, NXP Drone BLDC , ESC. 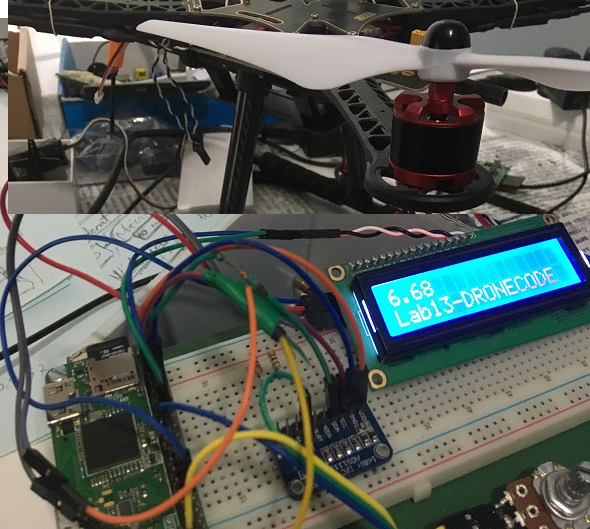
Modificare viteza ...........Observa Vizualizare Duty Cycle ...........Observa Modificare viteza cu potentiometru ..............Observa
The Linux Donecode project maintains a community of developers passionate about building autonomous actuators capable of providing transport, surveillance, and other services. The control screen is partially shown below 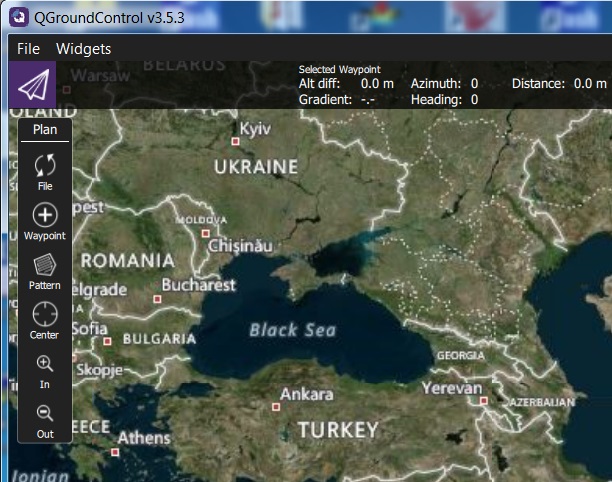 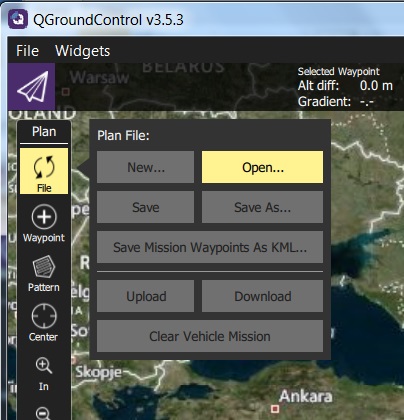
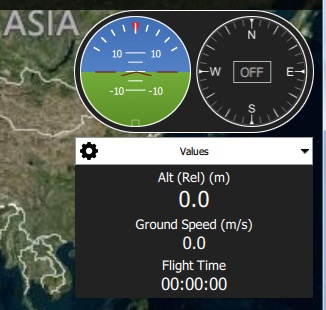  ..... ..... 
The Flight Controller has an LED whose color encodes the state of the drone as follows: 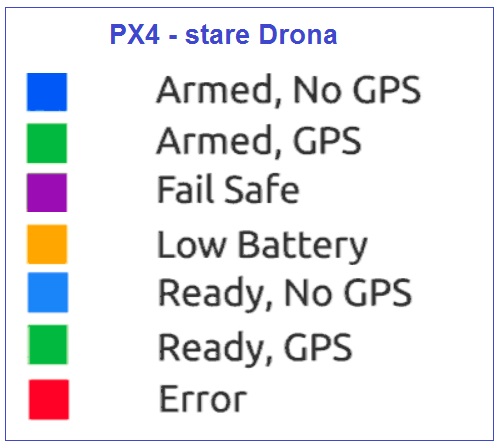 Recent a fost realizata o noua varianta de Flight controller (ARM A57) ce ruleaza PX4 denumita SkyNode a fost adoptat de catre DARPA. Conform anuntului oficial: Skynode also enables obstacle detection and avoidance, VIO positioning, Remote ID, and UTM. Skynode is directly integrated with the Auterion Cloud that enables predictive maintenance, aircraft and pilot management, compliance reports, and integrations into existing business workflows. 
The control diagram of a BLDC motor used for propulsion of the NXP drone is shown in the following figure: 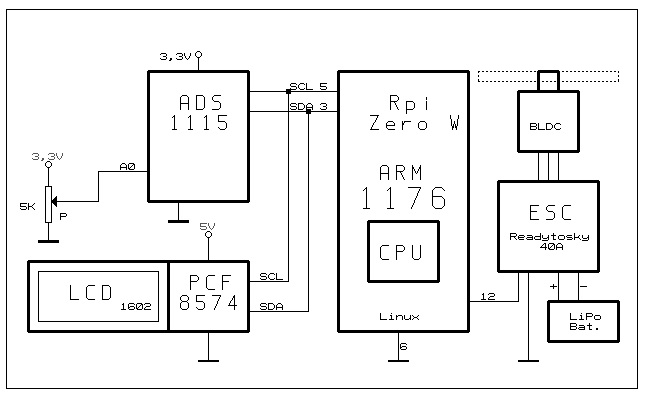 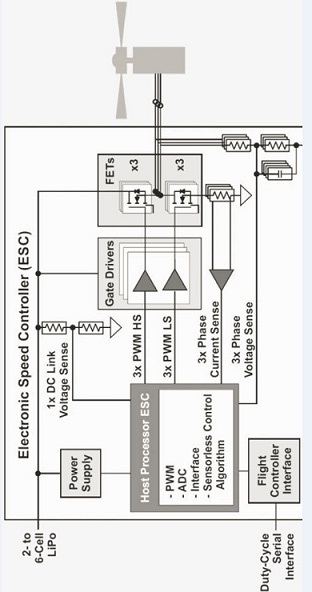 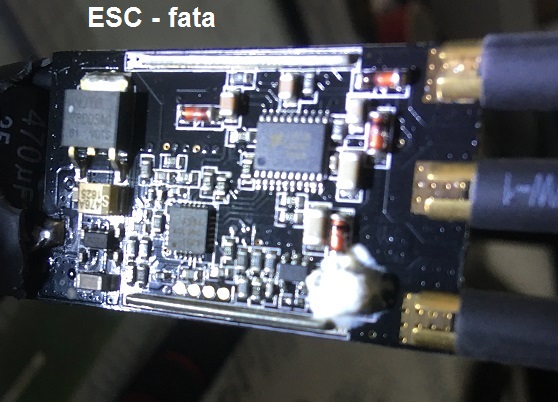 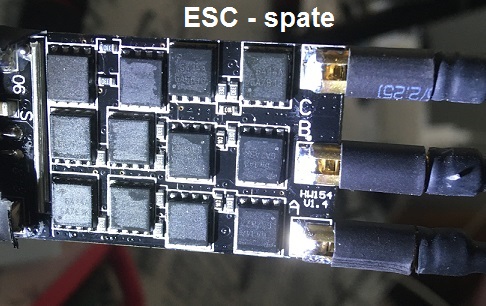 Secventa de armare consta din livrarea unui PWM cu viteza maxima pe durata de 2 secunde duapa care se poate cupla alimentarea motorului. Dupa 2 s se livreaz un semnal PWM corespunzator vitezei minime. Dupa acesata secventa motorul poate primi parametri de viteza , respectiv PWM cu duratele cuprinse in general in intervalul 1ms - 2 ms si perioada de 50 Hz. Secventele de armare/programare sunt insotite de semnale acustice care identifica starea modulului ESC.
1. Develop an application; 2. Create a program that will start the motor at minimum speed; 3. Develop a solution that will allow software-based reversal of the BLDC motor rotation direction; 4. Create a program; 5. Create a server application that will allow operating the BLDC motor using a web browser. 
- Dezvoltarea IOT cu actuatoare cu BLDC; - Dezvoltarea echipamente/interfete de lucru pentru persoane accidentate/invalide; - Realizare echipamente supraveghere incendii; - Realizare echipamente mobile transport marfa; - Realizare taxiuri aeriene - Aplicatii militare. 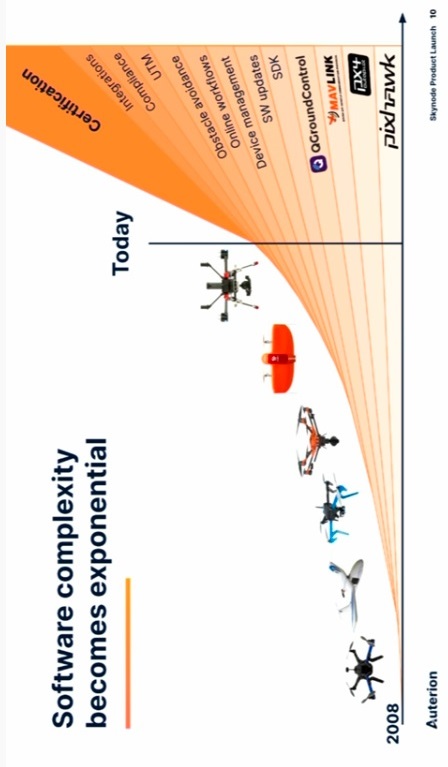
|