Experimentul de laborator introduce notiunle de baza referitoare la modul de proiectare si implementare
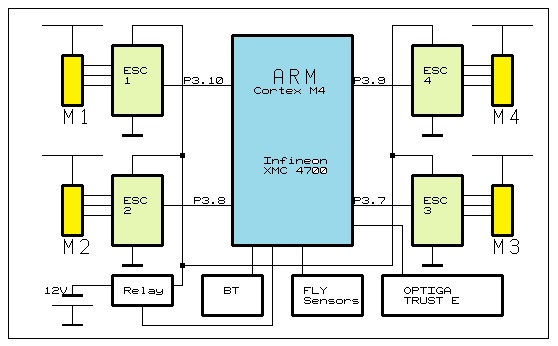
a sistemlor de actionare a motoarelor BLDC destinate dronelor si masinilor cu tractiune electrica. Solutia experimentala utilizeaza un procesor ARM Cortex M4 , ESC (electronic speed controller), un set de motoare BLDC cu rotor exterior precum si un motor BLDC pentru tractiune vehicol.
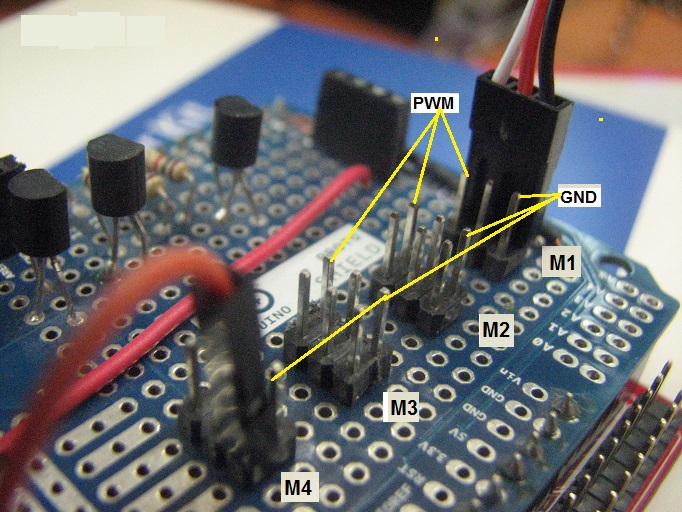
Se urmareste utilizarea componentelor DAVE pentru generarea semnalelor PWM pentru control motoare cu
scopul de a obtine o forta portanta maxima.
La sfarsitul alboratorului se vor detine informatii utile referitoare la modul de realizare a structurilor de tip multicopter
si e_vehicle;
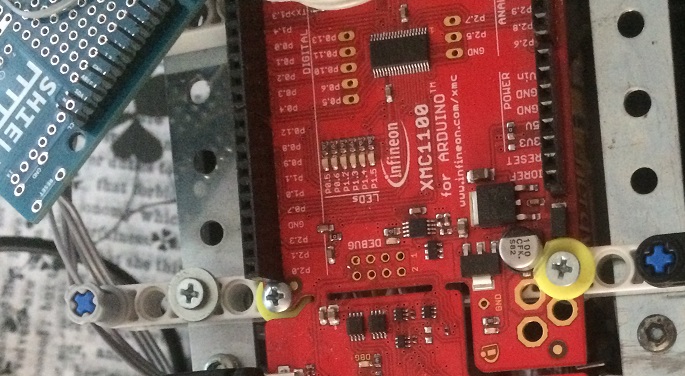
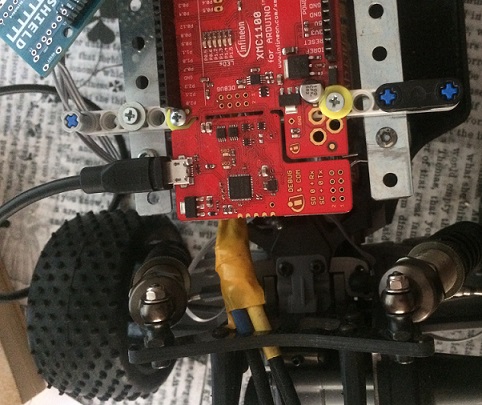
Hardware: Platforma XMC4700 Relax kit,Platforma XMC1100 Boot kit; set 4 ESC , 4 Motoare BLDC montate pe sasiu drona, acumulator 12 V, prototip electric_car cu servo si BLDC. Software: Mediul de dezvoltare DAVE4.3.2; 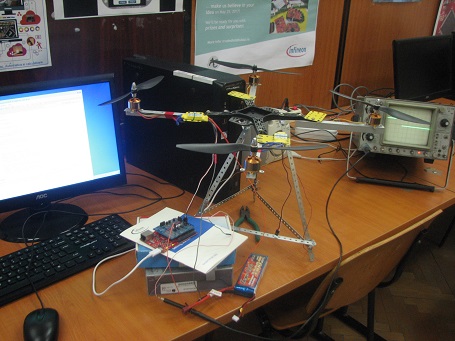 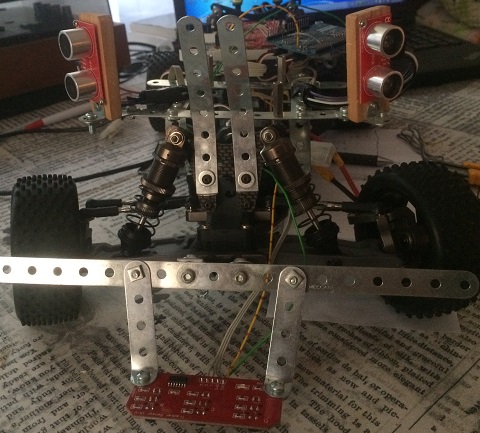
Program control directie si tractiune e_car
|


 © 2019 Fl. Pantilimonescu - Technical University Iasi,Romania
© 2019 Fl. Pantilimonescu - Technical University Iasi,Romania